OVERVIEW
In 1997, Teresa Marrin and Joseph Paradiso at MIT introduced the innovative instrument, the Digital Baton, aiming to capture the essence of a traditional baton while providing a multitude of expressive possibilities for users. Our experiment delves into the application of a digital baton in connecting with musicians, emphasizing how it can enhance both rehearsals and performances.

PROTOTYPE DESIGN
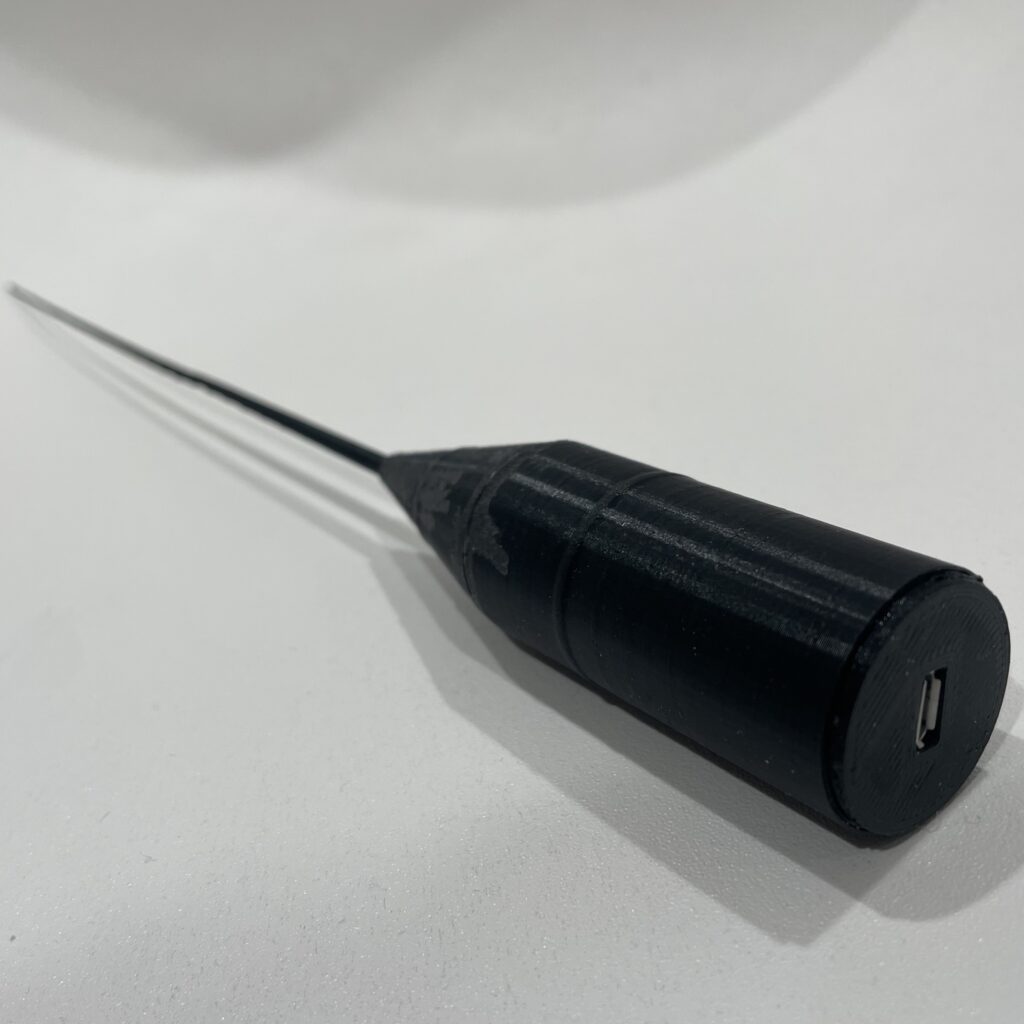
The prototype’s size was modeled after a small orchestra baton, measuring just over one foot. The body consists of two parts, with the initially planned wooden long stick portion being 3D printed separately due to balance concerns. Currently, the digital baton lacks proportional balance, with the control unit (gyroscope sensor and microcontroller) being significantly heavier than its counterpart. I have acknowledged this issue and am actively planning adjustments for the upcoming version.

FUTURE PLAN
The body material needs improvement. To achieve this, we plan to develop our own PCB design to shrink the size of the microcontroller board. Currently, I use the Raspberry Pi Pico W (RP2040). Since the unit doesn’t require all GPIOs provided by the Pico, creating our MCU circuit with a gyroscope sensor should reduce the size to less than 1/3 of the current one. With this modification, we anticipate the body will fit into a traditional baton shape.
Reply